F1 Aerodynamics — Shape Predictions & Optimization With Neural Concept Shape
How is AI-native engineering intelligence transforming aerodynamic design from isolated CFD simulations to systematic design space exploration?
F1 engineering is one of the most demanding design environments in the world. A front wing profile refined through dozens of CFD iterations might yield two hundredths of a second per lap. At this level, that is the difference between the podium and the points.
CFD emerged as a major development tool in the 1990s, progressively reducing dependence on physical testing by cutting the time and cost of evaluating new configurations. However, a constraint remained: engineers could explore only a handful of designs at a time, limited by FIA-imposed caps on wind tunnel runs and CFD computational allocation, compounded by the cost of high-performance computing and the sheer complexity of aerodynamic interactions.
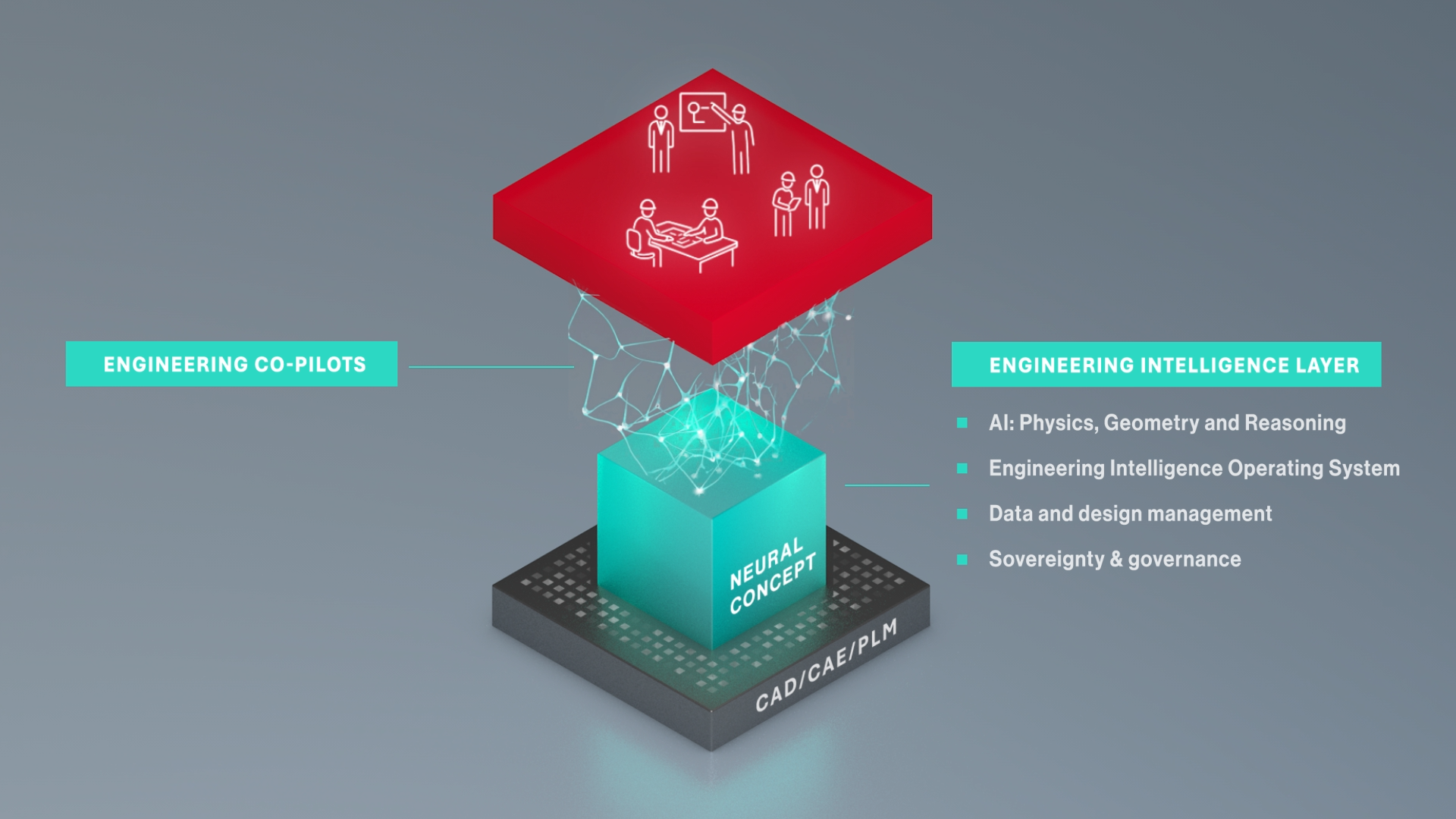
Today, engineering teams can continuously evaluate thousands of aerodynamic configurations throughout the full design cycle. Neural Concept was built to make this possible by incorporating an intelligence layer into the design, assisting aerodynamics teams.
This article covers what becomes possible when AI models trained on legacy CFD data remove the one-simulation-at-a-time constraint. F1 aerodynamics is the demonstration case. The article is for anyone interested in motorsport and automotive engineering who wants to understand both the technical method and the organizational shift behind AI-driven design space exploration.
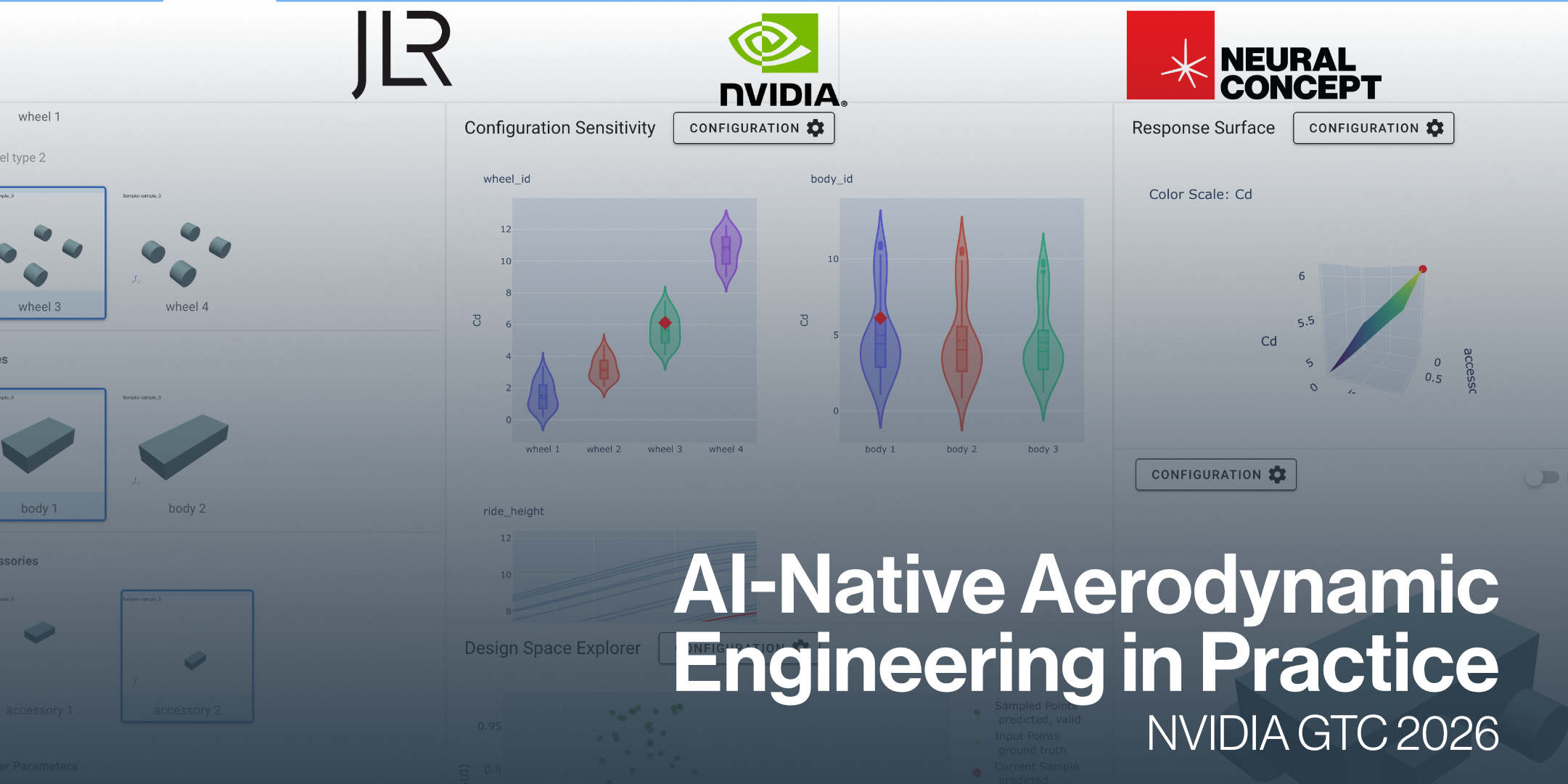
The Engineering Intelligence layer means that navigating the design space is no longer the exclusive territory of simulation specialists:
- A CAD engineer can evaluate the aerodynamic consequence of a geometry change before a single mesh is built.
- A wind tunnel engineer can cross-reference physical test results against thousands of predicted configurations.
Key Takeaways
- From isolated simulations to continuous design exploration. AI-native Engineering Intelligence removes the one-simulation-at-a-time constraint. Engineers can evaluate thousands of aerodynamic configurations across the full design cycle, turning the design space from a sample into a searchable asset.
- Legacy aerodynamic data as a strategic asset. Simulation archives that previously sat as project records become training data. Organizations that treat accumulated engineering data as institutional knowledge build a compounding advantage that grows more precise with every design cycle.
- Engineering Intelligence for the full team. Domain engineers operate AI-native workflows without needing machine learning or CFD expertise, broadening the pool of contributors to aerodynamic design decisions. Simulation-driven exploration is no longer confined to CFD specialists.
Why Is More Downforce Needed in F1 Cars’ Aerodynamics?
More downforce is needed because it increases the normal load on the tires without adding inertial mass, giving them the grip required to sustain cornering forces above 4G. Without sufficient downforce, an F1 car loses lateral traction through high-speed corners long before its mechanical limits are reached.
In high-velocity motorsport environments, optimizing F1 aerodynamics is a complex balancing act between generating less drag on straightaways and maximizing downforce through corners.
Generating significant downforce (i.e., a “negative lift”) fundamentally alters the vehicle’s dynamic operating envelope by increasing the normal load on the tires without adding inertial mass. This aerodynamic loading amplifies the tires’ coefficient of friction, delivering the essential lateral and longitudinal traction required to sustain cornering forces that frequently exceed 4G, while maintaining high-speed directional stability across variable circuit geometries.
While previous generations of Formula 1 regulations stipulated that a car’s total downforce equaled its own weight at around 150 km/h, the high-downforce ground-effect platforms introduced in recent years meet that crucial threshold at even lower speeds, though precise aerodynamic telemetry remains strictly team-confidential.
Unlike standard passenger car or truck aerodynamics, where the primary objective is streamlining to minimize air resistance, an F1 car intentionally introduces high-drag aerodynamic appendages. This design compromise is necessary because negotiating complex, high-velocity racing circuits demands localized tire planting and high maneuverability rather than pure straight-line streamlining.
Ultimately, every individual appendage on the chassis serves a deliberate aerodynamic purpose. The core engineering objective is not simply to minimize fluid resistance but to actively control it to maximize downforce, safely manage complex downstream wake structures, and maintain optimal mechanical contact patch loading through high-speed corners.

Fundamentals of F1 Aerodynamics and Aerodynamic Performance
Aerodynamic performance relies on the manipulation of fluid velocity and static pressure differentials across the vehicle’s surfaces.
- Classic upper-body profiles used inverted wing profiles to create high-pressure zones above the car.
- Modern vehicle design leverages underbody Venturi tunnels to create low-pressure zones beneath the chassis. This floor geometry creates a powerful suction effect that effectively pulls the car toward the track surface.
While the development cycle for recent regulations focused heavily on maximizing this underbody ground-effect suction, upcoming regulatory shifts are rebalancing this equation, scaling down reliance on total underbody floor area and introducing active, movable aerodynamic surfaces to optimize drag and downforce distribution across changing track sectors.
How to Measure Downforce? Traditional Aerodynamic Testing
Traditional aerodynamic testing measures downforce using multi-component force balances and load cells integrated into a wind tunnel's rolling road system, which capture vertical, lateral, and longitudinal forces in real time as the scale model is subjected to controlled airflow.
Validating these pressure differentials and overall aerodynamic performance historically relied on a combination of physical prototyping and scale-model wind tunnel testing. To precisely measure downforce under controlled laboratory conditions, aerodynamicists utilize specialized multi-component balances and high-precision load cells integrated directly into the wind tunnel’s rolling road system. These instruments capture localized vertical, lateral, and longitudinal forces in real time, mapping how the vehicle’s aerodynamic response varies with minute adjustments in pitch, roll, yaw, and static ride height.
To bridge the gap between static laboratory data and dynamic track environments, trackside engineering teams deploy physical sensor arrays directly onto the chassis during Friday practice sessions.
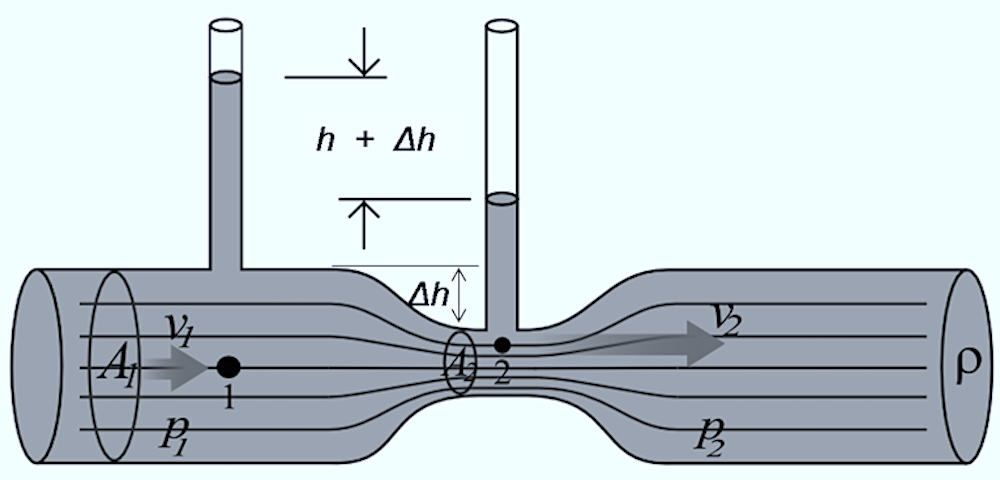
Specialized Pitot-static tubes and comprehensive aerorakes map localized stagnation and static-pressure differentials across key regions, such as the front-wing wake or rear diffuser exit. Translating these raw pressure readings into local dynamic pressure gradients, aerodynamicists can calculate real-world flow velocities, evaluate boundary layer separation, and verify whether the physical car matches the intended performance profile.
How to Measure Downforce? Traditional Computational Fluid Dynamics
CFD measures downforce by creating a digital model of the car and its surroundings, simulating airflow through numerical solvers, and computing the resulting aerodynamic forces on each surface element, including the net vertical force that constitutes downforce.
Starting in the 90s, wind tunnel testing began to be assisted by 3D engineering computations, or CFD Computational Fluid Dynamics.
In today’s teams, engineers rely on high-fidelity numerical aerodynamic simulations (i.e., CFD) to assess the effects of car design variations without building a prototype and conducting wind tunnel testing.
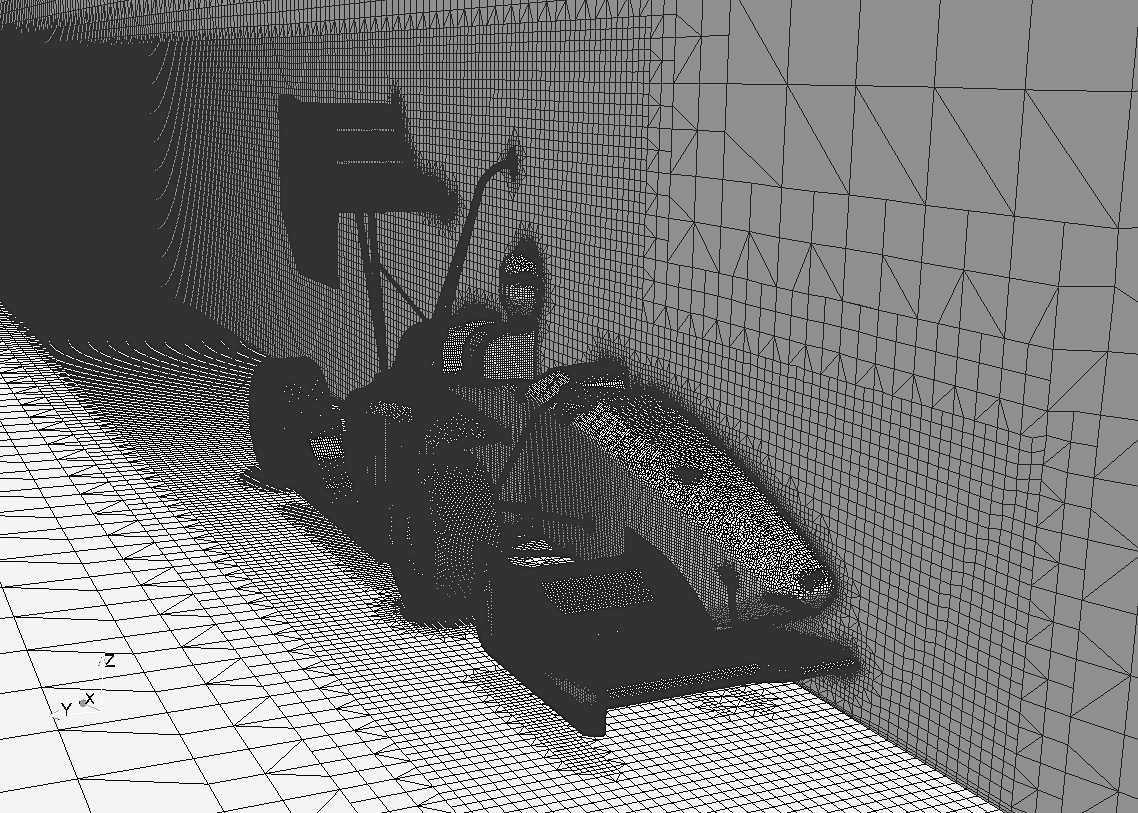
Measuring downforce with CFD involves creating a digital model of the F1 car and its surroundings, including the track and other vehicles. The model includes boundary conditions such as simulated velocity and wall roughness, as well as state-of-the-art computational meshes. The model is then used to simulate airflow around the car and calculate the aerodynamic forces acting on it. This can include the amount of downforce generated.
It is important to note that a CFD F1 simulation will not run on a desktop computer.
It’s Much More Than Increasing Downforce
For the sake of space, we have focused on downforce, its measurement, and how to compute it. However, other aerodynamic phenomena are relevant.
- Wake structures. The wake of a car creates two distinct effects on the following vehicle. On straights, slipstreaming inside the low-pressure wake reduces drag, allowing the trailing car to carry more speed into a braking zone. In corners, the same turbulent wake disrupts airflow over the front wing, making handling worse and reducing aerodynamic load. This turbulent wake is known as dirty air, as opposed to the clean air a leading car enjoys undisturbed.
- External factors. Managing airflow is crucial for cooling the power unit and hybrid system components in F1 cars. Wind direction affects car handling and downforce levels. High altitude reduces air density, impacting downforce generation. For instance, in Mexico, lower air density results in less downforce than in Monaco. Also, weather changes can significantly influence aerodynamic performance.
- Brake ducts and thermal management. When braking from 300 km/h to 80 km/h in under two seconds, a car generates extreme heat in the wheel assembly. Brake ducts channel airflow directly to the carbon discs. Their geometry also affects the aerodynamic wake around the front tire. Brake duct design is always a compromise between cooling and aerodynamic load.

CFD Technology Overview
The Navier-Stokes equations are at the core of all fluid processes, including aerodynamics. They describe (with other equations and several assumptions) the motion of fluids.
∂u/∂t + u · ∇ u = -(1/ρ) ∇ P + ν ∇²u
Here, u is the fluid velocity, P is the fluid pressure, and ρ is the density.
Unfortunately, there is no general analytical solution to the Navier-Stokes equations. In general, solutions to the equations require numerical approximations such as CFD.
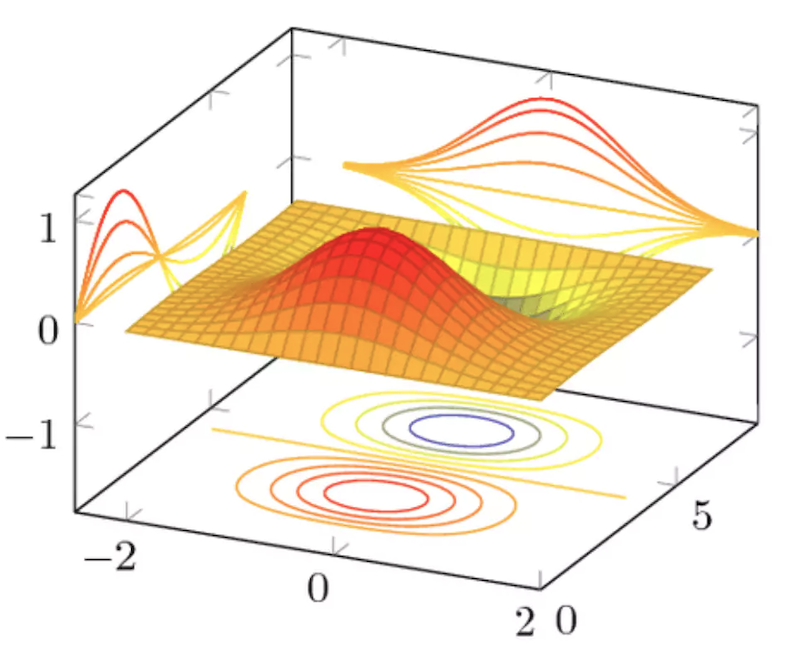
Numerical tools like CFD can compute the fluid’s velocity, pressure, and temperature at different points in 3D space within the simulation domain, starting from the car's CAD model.
Navier-Stokes and other equations can be solved in CFD in several ways, such as the Finite Volume Method.
How Does the Finite Volume Method Discretize Fluid Flow?
The finite volume method discretizes fluid flow by dividing the continuous simulation domain into millions of small control volumes, then enforcing conservation of momentum, mass, and energy across each cell's faces through numerical flux calculations rather than solving the governing equations in continuous form.
Key Question: Why does discretization determine how fast an F1 team can iterate on car design?
Every tenth of a second in lap time costs an F1 team its championship standing, and the finite volume method is where aerodynamic insight either compounds or stalls. Traditional Navier-Stokes solvers process complex geometries by dividing continuous physical space into millions or billions of discrete control volumes, and the cost of that division, in computation time and engineering cycles, is the ceiling most teams spend their season fighting against.
A clear example of this is the fundamental mathematical basis of standard CFD codes: the Elementary Finite Volume Scheme with an Upwind approximation.
We start from the integral form of a conservation equation for quantity φ (momentum, energy, etc.) over a control volume V bounded by a surface S,
∫∫∫ ∂φ/∂t dV + ∬ Φ dS = ∫∫∫ Q dV
where Φ is the flux of φ through the surface, and Q is the source term: any process generating or dissipating φ within V.
To transition from physics to numerics (assume steady-state and incompressible flow), the integral over continuous domains becomes a summation over discretized computational cells of volume Vᵢ and face Aᵢ:
∑ᵢ Φᵢ × Aᵢ = ∑ᵢ Qᵢ × Vᵢ
For each computational cell, the net flux of φ through all faces equals the net source generated within the cell volume.
Elementary Finite Volume Scheme - Upwind
Key Question: Why can't the solver simply use the value at the current cell to estimate flux?
Problem: In a convection-dominated flow, using a centered difference to estimate φ at a cell face ignores the direction the fluid is actually traveling. The result is numerical instability: oscillations that corrupt the solution and, in practice, cause the simulation to crash before a result is produced.
Solution: The upwind scheme forces the solver to look upstream. The derivative of φ at cell i is approximated as:
∂φ/∂x ≈ (φᵢ - φᵢ₋₁) / Δx
where φᵢ is the value at the current cell, φᵢ₋₁ is the value at the upstream cell, and Δx is the distance between the two cell centers.
Balancing flux in against flux out gives the net rate of change of φ inside cell i, and integrating over the cell volume yields the discrete update rule:
φᵢⁿ⁺¹ = φᵢⁿ - (u · Δt / Δx) · (φᵢⁿ - φᵢ₋₁ⁿ)
The term u·Δt/Δx is the CFL number. Keeping it at or below 1 is the stability condition: if the fluid travels more than one cell width per time step, the scheme breaks down. That constraint on Δt is the practical price of the upwind approach.
The full cycle is: reconstruct the gradient, compute the flux, and integrate over the cell.
Numerical Simulation
Key Question: What does a CFD run actually cost a team in time, accuracy, and turbulence resolution?
- Speed: A single high-fidelity CFD run on a full-car geometry can take hours to days on a large compute cluster. Aerodynamicists can complete tens of simulations per week under budget, far fewer than the design space requires. Each configuration change restarts that clock.
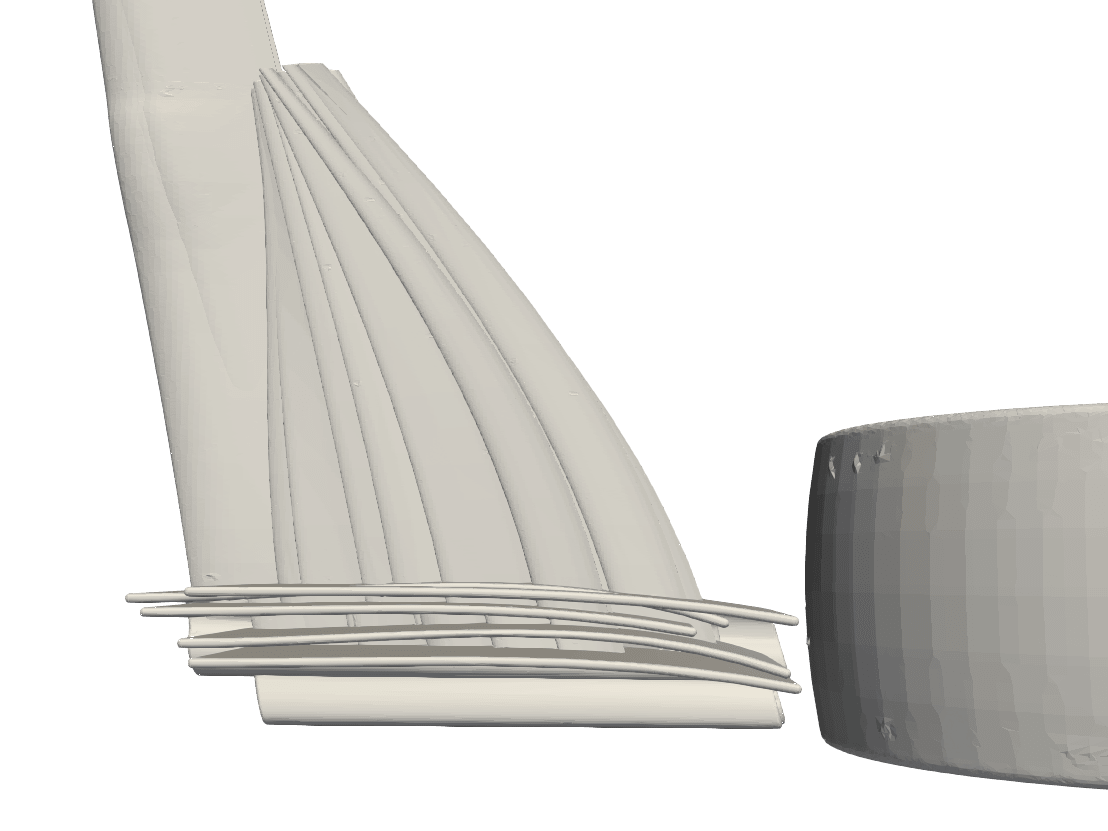
- Accuracy: Accuracy scales with mesh density. Refining the mesh to resolve features such as vortex shedding from front wing endplates or wake interaction behind the rear diffuser multiplies the cell count, and therefore the compute time, nonlinearly. Teams constantly trade resolution against turnaround.
- Turbulence: Turbulence is where traditional solvers carry their highest cost. Full Direct Numerical Simulation (DNS) is computationally prohibitive at race-relevant Reynolds numbers. In practice, teams rely on Reynolds-Averaged Navier-Stokes (RANS) or Large Eddy Simulation (LES) models, each introducing closure assumptions that limit fidelity in separated flow regions. The areas that matter most aerodynamically are precisely the ones most difficult to resolve.
What Hardware is Needed for F1 CFD?
Executing high-fidelity CFD simulations within motorsport demands specialized High-Performance Computing (HPC) architecture engineered to handle massive parallel processing workloads and intensive data throughput. Because the FIA strictly regulates and caps total computational allocation (limiting both core-count utilization and maximum processing capacity per aerodynamic development cycle), Formula 1 teams must maximize the efficiency of every hardware cycle.
- Infrastructure Evolution: Modern setups have transitioned away from purely legacy on-premises clusters toward hybrid and cloud-native topologies.
- Deployment Platforms: Highly optimized containerized workloads now run on platforms like AWS HPC or Microsoft Azure alongside dedicated local nodes.
A standard motorsport HPC ecosystem relies on several tightly integrated layers:
- Compute Nodes: Dense clusters utilizing thousands of high-frequency processor cores linked via ultra-low-latency interconnects (such as InfiniBand) to facilitate rapid inter-node communication during large-scale parallel scaling.
- Workload Management: Advanced enterprise cluster management and job scheduling software like Slurm or PBS Professional to optimize resource queues.
- High-Throughput Storage: Parallel file systems and network-attached storage architectures capable of handling extreme read/write speeds concurrently, as a single transient simulation run can generate terabytes of raw data.
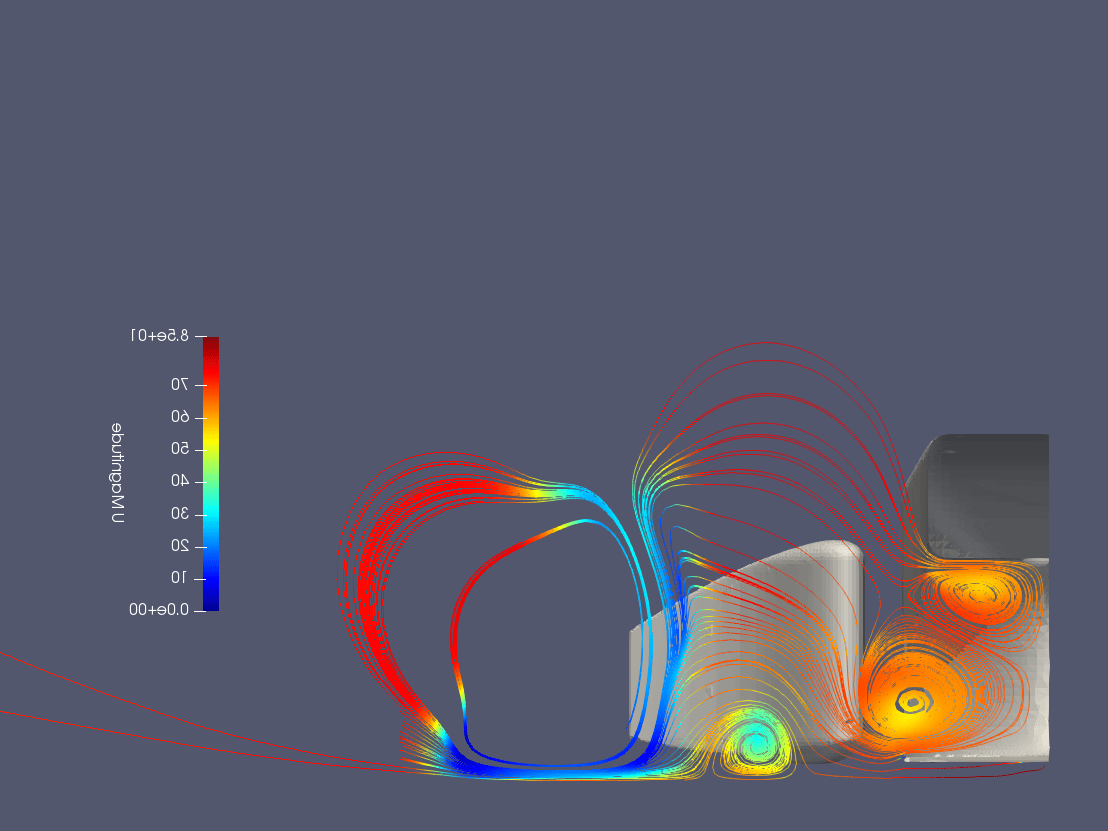
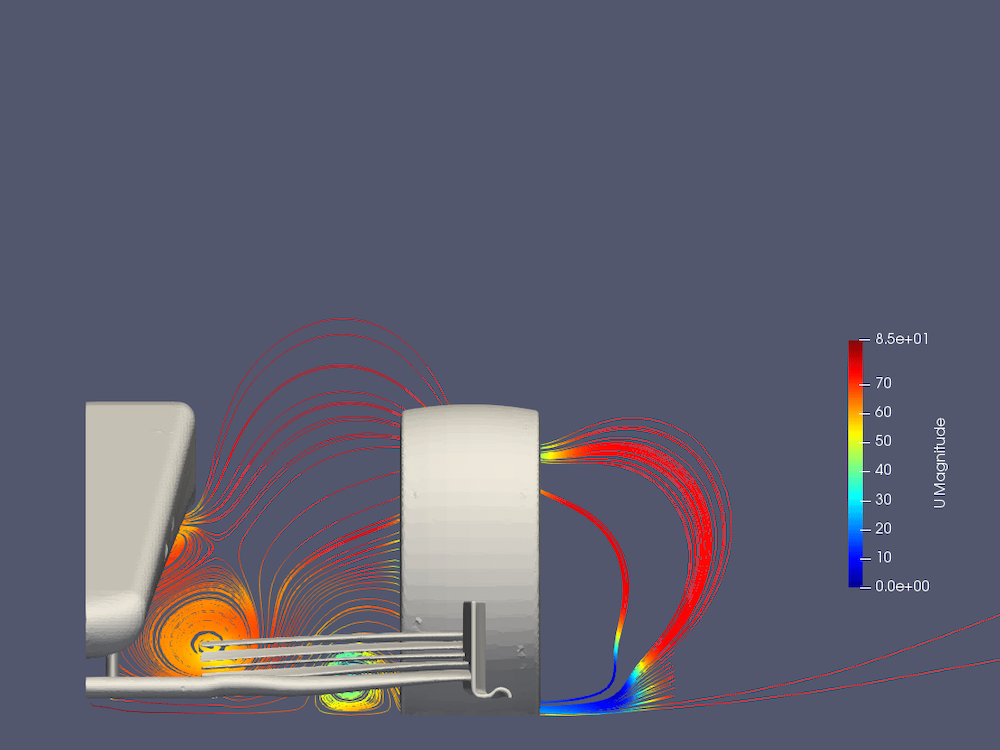
- Post-Processing & Validation: Dedicated visualization nodes equipped with high-end enterprise GPUs to post-process and render volumetric flow fields, surface pressure maps, and vortex trajectories through advanced analysis software like ParaView or Tecplot.
It is also worth noting that Formula One teams have very high security standards to protect their data and intellectual property. Therefore, they use specialized security software to protect their HPC, such as firewalls, intrusion detection systems, and VPNs.
Crucial Role of Front and Rear Wings
The rear wing’s design is a critical aspect of Formula One aerodynamics, as it can significantly impact performance via rear downforce.
The rear wing works by diverting airflow over the vehicle, creating a low-pressure area beneath it and a high-pressure area above it. The pressure differential between the two surfaces generates a downward force.
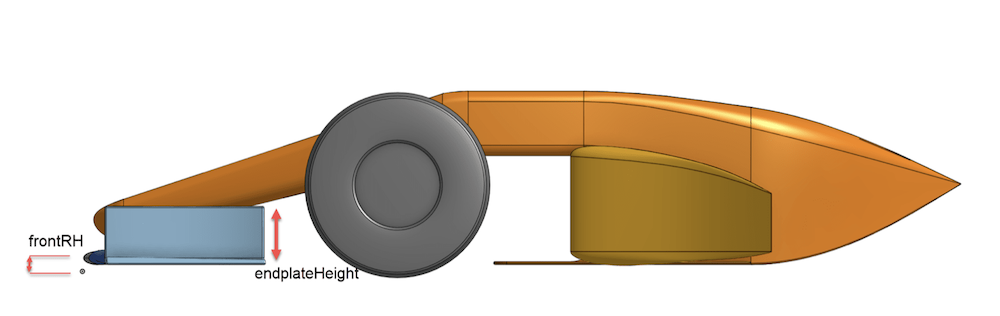
The rear wing comprises several elements, including the main plane, the endplates, and the rear wing flap(s).
- The main plane is the primary surface of the wing that generates most of the downforce.
- The endplates are used to guide the airflow over the wing and control the pressure distribution.
- The flaps can be adjusted to fine-tune downforce and drag balance and are a crucial component of the car’s setup.

- The rear beam wing (RBW) is a specific rear aero structure for cars. RBW is a type of aerodynamic device mounted on the rear of the car, i.e., a narrow and high wing above the rear suspension and parallel to the rear axle. It is designed to generate downforce and improve car handling and stability at high speeds.
- The rear beam wing works by redirecting airflow over the rear of the car, creating a low-pressure area beneath the car and a high-pressure area above it. The pressure differential produces an aerodynamic load.
- The front wing is another key component that creates aerodynamic load. The front wing is located at the front of the car and is designed to create a downward force on the car as it moves through the air. This force helps press the front tires into the track, increasing the grip and traction available to the driver and allowing them to take corners at higher speeds. Additionally, the downforce helps to improve stability. This makes it more difficult for a stable car to spin out of control.
- The front wing works by diverting airflow over the car. It creates a low-pressure area on the top surface of the wing and a high-pressure area on the bottom surface. This creates a pressure difference between the wing’s top and bottom surfaces, generating an aerodynamic load.
Is the Rear Or the Front Wing More Important?
The rear wing is more important for generating raw downforce. It is larger, produces a greater share of the car's total aerodynamic load, and offers more adjustability than the front wing, though both must work together for balance.
Both the rear and front wings are essential components of Formula One.
- The downforce produced by the front wing is essential for providing traction to the front tires and allowing the driver to take corners at higher speeds.
- The downforce generated by the rear wing is essential for providing traction to the rear tires and maintaining stability at high speeds.
Both the front and rear wings play critical roles in the car’s performance. The front wing and the rear wing are, in fact, designed to work together, and the aerodynamic load produced by each wing is dependent on the other wing.
However, the rear wing is more critical for generating downforce (aerodynamic load) in Formula One. The rear wing is larger than the front wing and generates a greater proportion of the car’s total aerodynamic load. Additionally, the rear wing is more adjustable than the front wing, which allows teams to fine-tune the car’s aerodynamic performance. The rear wing is also subject to more regulations than the front wing regarding size, shape, and number of elements. Therefore, its engineering is even more challenging.
- In the 1990s, front and rear wings dominated the aerodynamic load budget: the front wing contributed 40-50% and the rear wing 50-60%, with the floor playing a secondary role.
- In the current ground-effect era (2022 onwards), the floor and diffuser generate more than 60% of the total aerodynamic load. The front and rear wings each contribute a substantially reduced share, but remain critical for balance and trim.
Method Overview: From Wind Tunnel Testing to AI
Computational Fluid Dynamics simulations are at the heart of the car development process for all Formula 1 teams and are among the critical performance factors in the race.
- Even though teams can generate thousands of simulations annually corresponding to thousands of design variations, they are limited by both computational cost and FIA (International Automobile Federation) rules.
- Among this large number of designs, it is critical to converge quickly towards optimized designs. Hence, running fast simulations is critical in this phase. However, low-fidelity simulations are not an option since the very complex nature of the phenomena can only be captured with high-fidelity resolution.
- Engineering computations require a high degree of accuracy, as even the slightest improvement can affect aerodynamic performance. Also, simulations need complex mathematical operations over (hundreds of) millions of points in 3D space.
- This can only happen with massive hardware, such as a CPU or GPU, with sufficient RAM and up to thousands of processors.
The Regulatory Ceiling
The FIA’s Aerodynamic Testing Regulations (ATR) strictly dictate the total development volume each team may conduct per Aerodynamic Testing Period (ATP), a rolling two-month allocation window. This framework operates on a sliding scale dynamically tied to a team’s position in the Constructors’ Championship.
- The Allocation Balance: The lower a team finishes in the standings, the more testing capacity they are granted.
- The Standings Delta: The leading constructor is typically restricted to 70% of the baseline allocation, whereas a midfield team running seventh receives 100%. Every shift in position on the grid adjusts the allowable compute and wind-tunnel allocations by 5%.
- The Penalty Matrix: Overruns are discouraged, with excess usage penalized at 10 times the overage amount in the subsequent ATP cycle.
The practical consequence of this sliding scale is a forced convergence of the grid: the teams with the fastest cars are legally restricted to the narrowest development windows. At the front of the field, the gap between what an aerodynamicist wants to simulate and what the regulations physically permit creates a permanent operational constraint.
Traditional AI Approaches
In this section, we review a few traditional AI approaches.
- Kriging is a method for predicting unknown values at a given point using the known values of nearby points. The prediction is based on a spatial correlation model. Kriging is commonly used in mining and all fields where spatial data are collected.
- Surrogate modeling via Gaussian Process (GP) Regressors creates simplified models of complex systems. Aerodynamicists rely on them to approximate high-fidelity systems without costly simulations. GP Regression, a non-parametric Bayesian method, fits smooth functions to sparse data by modeling the engineering function as a joint Gaussian distribution. Bayesian inference uses prior knowledge and data to estimate vehicle performance parameters. Although GP regressors provide predictions and uncertainty measures, they perform poorly with complex, non-linear 3D geometries of modern racing chassis. This limits their use, requiring simplified design variables, which modern geometric deep learning platforms aim to improve.
- Reduced Order Modeling (ROM) encompasses a sophisticated suite of mathematical techniques for constructing low-dimensional approximations of highly complex, high-fidelity systems. A ROM can reduce the computational overhead and clock time required to evaluate fluid dynamics by orders of magnitude. The high-dimensional 3D Computer-Aided Engineering (CAE) simulation data are projected onto a much smaller subspace.
- Mathematical Foundations: A primary mechanism within this framework is Proper Orthogonal Decomposition (POD).
- Dimensionality Reduction: POD extracts the most energetic orthogonal modes from a snapshot matrix of historical CFD runs. This allows engineers to capture the dominant features of a flow field using only a fraction of the original dataset’s degrees of freedom.
Enter Physics AI and Engineering Intelligence
The Neural Concept platform introduced Geometric Convolutional Neural Networks (GCNNs).
Unlike standard CNNs, which operate on regular 2D image grids, 3D GCNNs operate directly on 3D surface meshes. Convolution operations allow neural networks to learn aerodynamic patterns from the actual geometry rather than from pixelated projections.
As a result of the training process, the Physics AI engine can predict in fractions of a second (compared to hours needed by CFD).
Thus, physics AI speeds up individual simulations.
Accelerating a single simulation step, however impressive, doesn’t change the shape of the engineering process. The improvement lies in the workflow structure. Rather than focusing on a single AI prediction in isolation, the improvement comes from supporting and documenting design decisions and allowing companies to own the intelligence that accumulates over months and across programs.
Thus, Engineering Intelligence changes what becomes possible to decide and who decides it.
Rather than a faster simulation engine, the goal is an intelligence layer that turns design exploration into a continuous, data-driven process, not a sequence of isolated predictions.
Neural Concept has built an engineering intelligence platform on top of the physics-aware AI layer, embedding aerodynamic predictions directly into design workflows and enabling engineers to explore entire design spaces rather than one geometry at a time.
Traditional approaches force a choice between accuracy and speed. Running enough simulations to map a design space meaningfully is either too slow or too expensive. Neural Concept’s platform removes that constraint, connecting design space generation to simulation-driven evaluation in a continuous loop. Over months and programs, the accumulated intelligence remains within the organization.
The DrivAerNet++ Benchmark
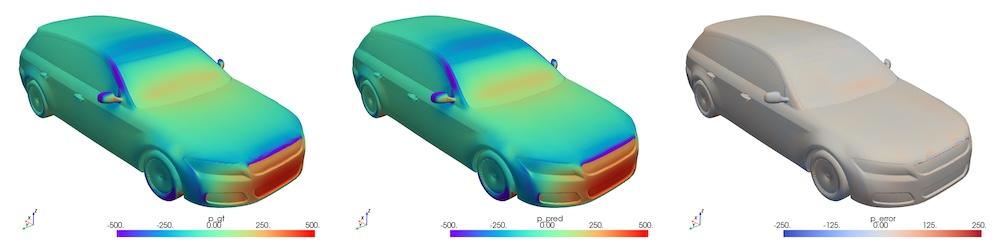
In 2025, Neural Concept achieved state-of-the-art results on MIT’s DrivAerNet++, the most comprehensive public benchmark for automotive aerodynamic prediction.
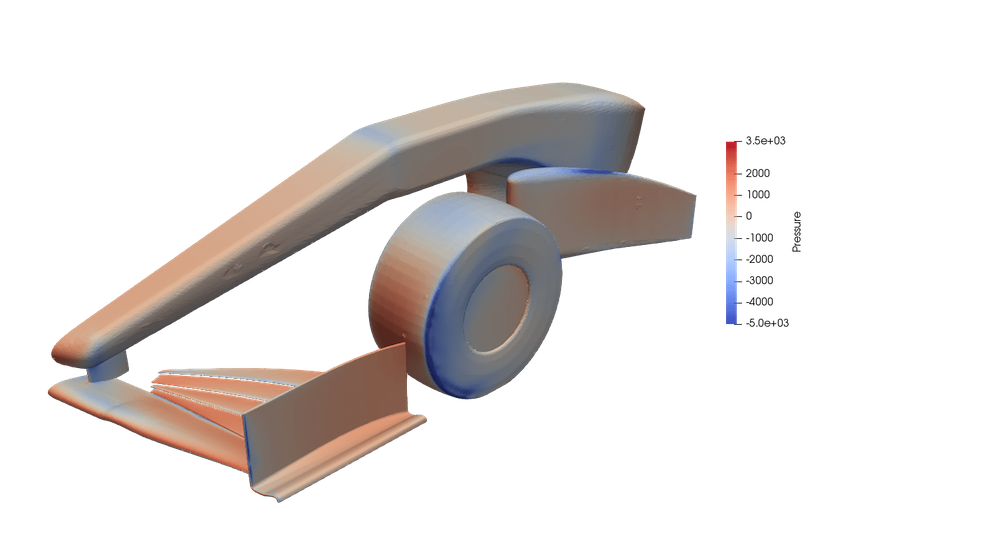
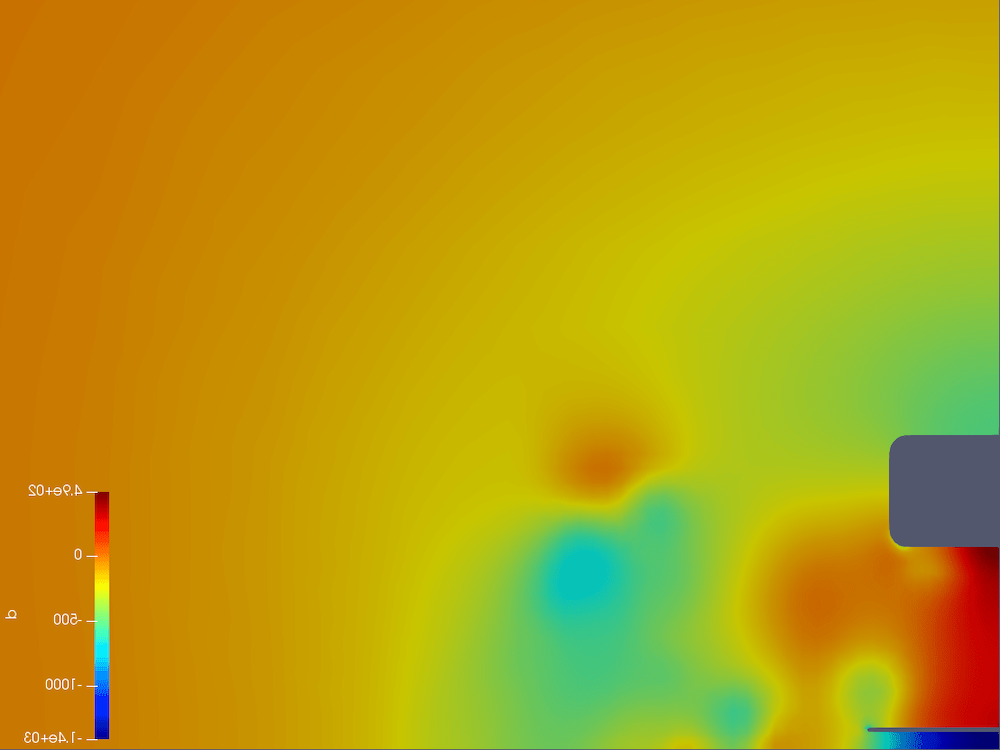
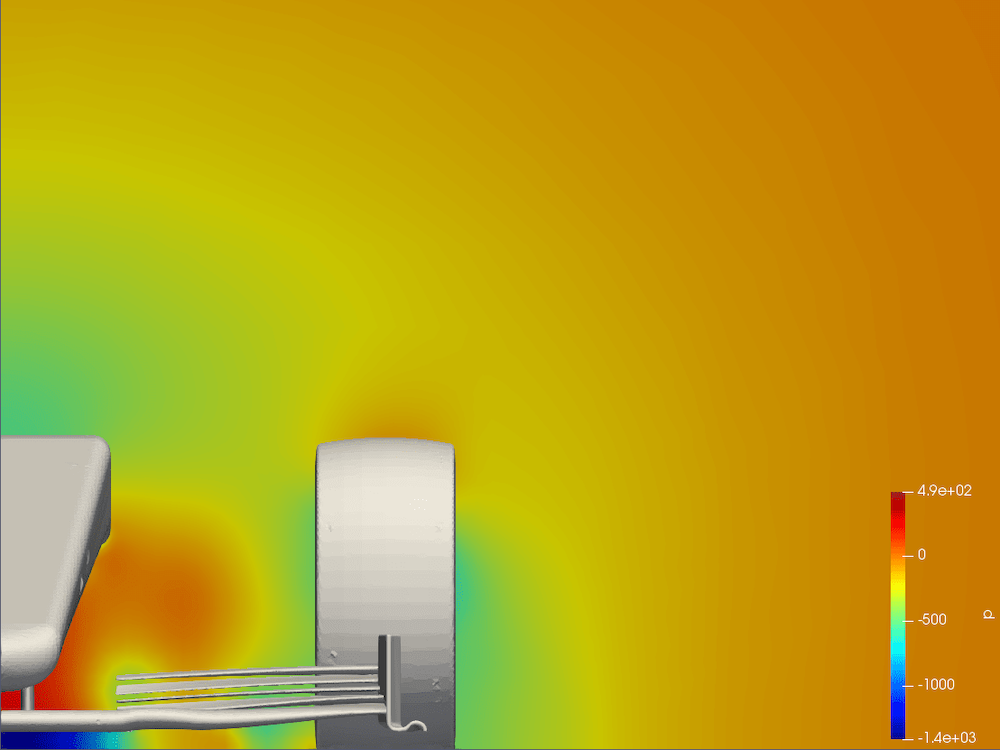
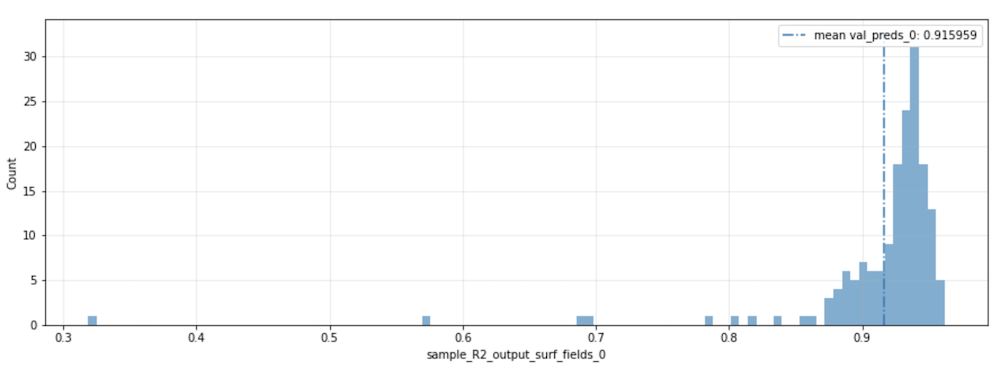
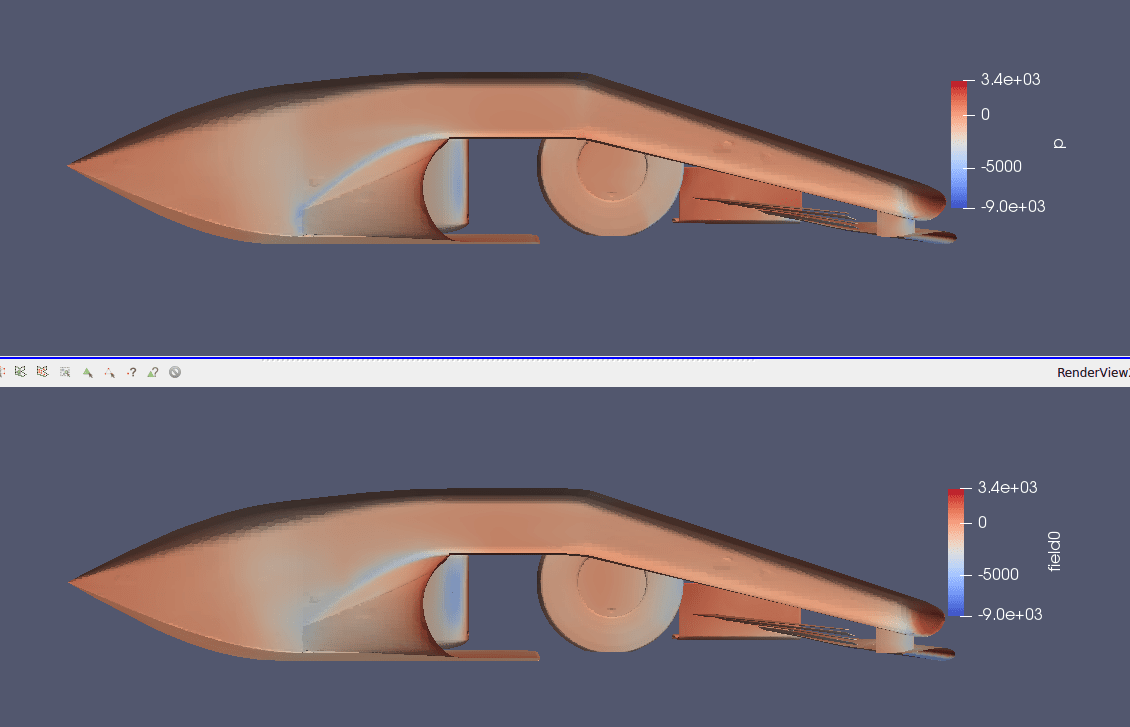
The results cover all relevant external aerodynamic outputs: surface pressure, wall shear stress, volumetric velocity, and drag coefficient. On drag prediction, the Physics AI predictor reached an R² of 0.978 on the official test split, cutting the mean squared error of the previous best published result by more than 10x. That level of accuracy supports early-stage design screening without running a full CFD simulation for every variant.
But accuracy is where the benchmark ends and the engineering problem begins. Neural Concept turned 39 TB of raw CFD data into a production-ready workflow in one week. Customers report 30% shorter design cycles as a direct result.
DrivAerNet++ covers passenger car configurations: fastback, notchback, and estateback body styles, with ICE and EV underbody variants. The geometric complexity of fastback and estateback transitions presents wake-management challenges that are aerodynamically analogous to those motor sport engineers face behind diffusers and rear wings, making the benchmark a meaningful test of model generalization despite the difference in vehicle class.
Traditional CFD vs. AI-Driven Engineering Intelligence: Quick Reference
Traditional CFD | Engineering Intelligence | |
|---|---|---|
Turnaround per design | Hours to days per run on HPC cluster | Seconds to minutes |
Prototype dependency | No physical prototype needed; geometry enters the queue directly from CAD | No physical prototype needed; geometry evaluated at inference time |
Repeatability | Identical boundary conditions every run; no tunnel calibration noise | Fully deterministic inference; results are as repeatable as the high-fidelity simulations used to validate the model |
CAD integration | Requires "clean" aerodynamic abstraction; design CAD must be manually prepared | Native geometric deep learning operates directly on CAD-native representations; integration with design workflows improves with each model generation |
Accuracy ceiling | High fidelity achievable with sufficient mesh refinement and LES/DNS | Validated against full CFD on production geometries; accuracy improves systematically as the training dataset grows |
Turbulence resolution | RANS/LES models available; DNS prohibitive at race Reynolds numbers | High-fidelity turbulence representation derived from training data; coverage extends as the dataset grows |
Skill requirement | Specialist CFD engineers required; significant expertise beyond software operation | Lower barrier for design-space exploration |
Infrastructure cost | Large HPC cluster; cost scales with run frequency | High upfront training cost; marginal inference cost near zero once deployed |
Design space coverage | Each configuration is a separate run; broad exploration is compute-limited | Thousands of configurations per session; exploration cost largely decoupled from run count |


.webp)